Ice Bot: quieren enviar un robot hecho de hielo a otro planeta
Investigadores de la Universidad de Pensilvania están desarrollando Ice Bot, el primer robot en su tipo hecho de hielo para trabajar en entornos árticos y en el futuro poder enviarlos a otros planetas.
Por Hermes Lavallén
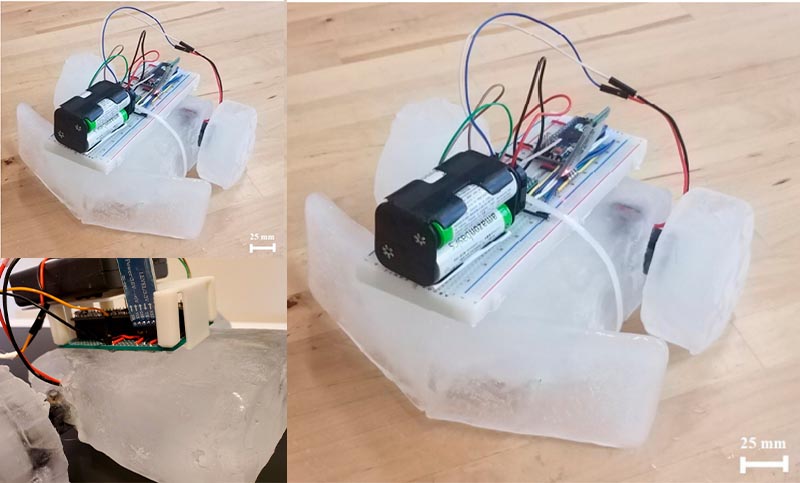
Laboratorio GRASP IceBot es un robot de prueba de concepto con partes estructurales hechas de hielo.
Un grupo de Científicos, del equipo de investigación de la Universidad de Pensilvania están diseñando robots de hielo. Aquí el porqué.
Dado que los robots no están diseñados para reparaciones, no hay mucho que se pueda hacer cuando se averían en otros planetas. Y este es el mayor problema: encontrar los recursos necesarios para que los robots sigan funcionando en entornos extremos. Hemos logrado resolver el problema de la energía bastante bien, a menudo aprovechando la energía solar, porque la energía solar es un recurso que se puede encontrar en casi cualquier lugar. No se pueden hacer ruedas con energía solar, pero se pueden hacer ruedas y otros componentes estructurales con otro material que se puede encontrar por todos lados: hielo.
Los desarrolladores
Devin Carroll y Mark Yim del GRASP Lab de la Universidad de Pensilvania, en Filadelfia. En un artículo presentado en la Conferencia Internacional IEEE / RSJ sobre Robots y Sistemas Inteligentes (IROS).
Dicen que apenas han comenzado a explorar la idea de un robot hecho de hielo. Obviamente, no se podrá fabricar actuadores, baterías u otras cosas electrónicas con hielo, y el hielo nunca será tan eficiente como un material estructural como el titanio o la fibra de carbono o lo que sea. Pero el hielo se puede encontrar en muchos lugares diferentes, y es bastante único en la forma en que se puede modificar: se puede usar el calor para cortarlo y esculpirlo, y también para pegarlo a sí mismo.
Devin Carroll y Mark Yim del GRASP Lab de la Universidad de Pensilvania, en Filadelfia. Devin Carroll (Doctor. en Ingeniería Mecánica y Mecánica Aplicada). Mark Yim (Director, GRASP LAB; Dir. de la facultad, Estudio de Diseño (Ventures Labs).
Devin Carroll comenta:
“El principal desafío logístico en la construcción de este robot es el entorno operativo. En entornos árticos simulados, se demuestra que el robot es capaz de viajar a través de capas de hielo y puede subir pendientes heladas. En ambientes más fríos (menos de -17 ° C) esperamos el ángulo máximo escalable para aumentar, porque el coeficiente de La fricción del hielo aumenta al disminuir la temperatura.
Este trabajo es un paso hacia un diseño ligero y adaptable. Sistema robótico capaz de funcionar en entornos bajo cero. Este sistema se presta a la autoconfiguración, la autorreplicación y la autorreparación.”
Diario Conclusión presenta a Devin Carroll desde la ciudad de Philadelphia en Pensilvania, Estados Unidos.
— ¿Cómo se te ocurrió esta idea de hacer robots de hielo?
—Davin: Hola y gracias al Diario Conclusión de Rosario-Argentina por estar interesado en presentar mi trabajo con Ice Bot, un robot primero en su tipo hecho de hielo.
—Primero se nos ocurrió la idea de este tipo de robot mientras exploramos formas de hacer que los robots fueran más robustos en entornos remotos y hostiles. La naturaleza desgasta mucho a los robots que operan en el campo y, una vez que se descomponen, tradicionalmente, deben llevarse al laboratorio para su reparación. Nuestra idea era que al usar material encontrado, material disponible localmente en el entorno del robot, como el hielo, podemos crear robots robustos y económicos para la exploración y la recopilación de datos. En nuestro artículo argumentamos que los robots hechos de materiales encontrados tienen inherentemente capacidades de autorreparación y auto modificación. Mostramos el aumento conectando un arado a nuestro robot y luego usando ese arado para quitar el papel de su trayectoria.
— ¿Estos robots incorporan capacidad de auto modificación o reparación?
—Si bien no mostramos explícitamente las capacidades de autorreparación en el documento, uno podría imaginarlo de manera similar a cómo colocamos curitas en los cortes. Si la estructura del robot se agrietará o se rompiera, podríamos colocar un vendaje de hielo sobre la rotura, reparando el robot y dándole fuerza adicional.
—¿Cuál es el mayor desafío para el futuro de este proyecto? ¿En qué estás trabajando a continuación?
— Uno de los mayores desafíos para el futuro es lidiar con la incertidumbre de nuestro material de construcción. Hay muchos tipos diferentes de hielo y cada uno tiene diferentes propiedades y resistencias materiales, algo que no conocemos de antemano. El trabajo futuro deberá abordar esto. Además, necesitamos automatizar el sistema. Esto incluye diseñar métodos para integrar actuadores con bloques de hielo y desarrollar efectores finales para manipular bloques de hielo a medida que los mecanizamos con las geometrías que deseamos. Ambas son áreas en las que planeo trabajar en el futuro. Gracias por escuchar y gracias nuevamente al Diario Conclusión de Rosario-Argentina por darme la oportunidad de compartir mi investigación.
Enlaces:
http://ras.papercept.net/images/temp/IROS/files/2114.pdf
https://www.youtube.com/channel/UCTR6bnAZqDf-YoTK9wYfLyw
https://www.youtube.com/watch?v=P-bzCH1UVzY&feature=youtu.be